A set of links to Algebra and Trigonometry GeoGebra applets hosted on GeoGebraTube.
Tag: Quadratics
Polynomials and VEX Drive Motor Control

Your knowledge of quadratic (or higher degree) polynomial equations can be useful in solving issues that arise when writing the code to translate joystick movements into VEX drive motor outputs.
3 Ways to “Complete the Square”
Explore three variations on how to “Complete the Square” when solving quadratic equations.
Function Dilations: How to recognize and analyze them

How to recognize vertical and horizontal dilations in both graphs and equations.
Function Translations: How to recognize and analyze them
How to determine both vertical and horizontal translation factors (relative to a “parent function”) when looking the definition of a function.
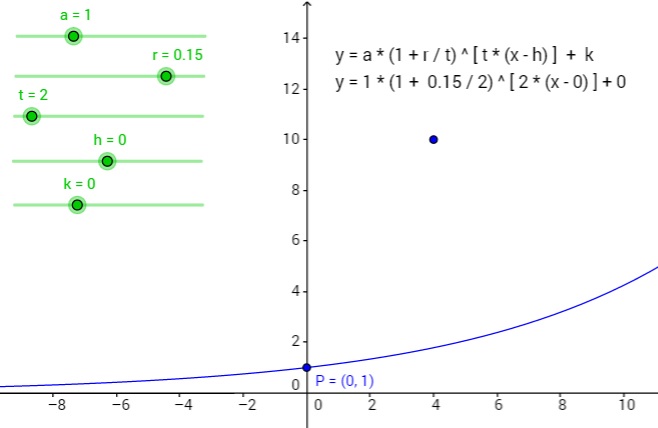
GeoGebra Applets That Help Understand Equation Behavior
A list of GeoGebra applets that help students better understand the relationship between the coefficients in an equation and the corresponding graph.
Summary: Algebra
When faced with an algebraic expression or equation, there are only two types of things you can do to it without changing the quantitative relationship that it describes. Re-write one or more terms in an equivalent form This can be done to any expression (no equal sign) or equation (with an equal sign) at any…… Continue reading Summary: Algebra
Why Quadratics?
Exploration of why quadratic equations are worth learning about: how they are related to linear equations and other polynomials, some of the skills students will learn by studying quadratics, and examples of where quadratic equations are useful outside of math class.
Keep Your Eye On The Variable
The following equations all have a similarity: $latex y = |x – 8| + 5\\*~\\*y = 4(x – 6) – 7\\*~\\*(x – 3)(13x + 11) = 0\\*~\\*y = (x + 1)^2 – 9&s=2&bg=ffffff&fg=000000$ The similarity is that they all have expressions like (x- 6) or (13x + 11), which are often either translations or factors.…… Continue reading Keep Your Eye On The Variable
